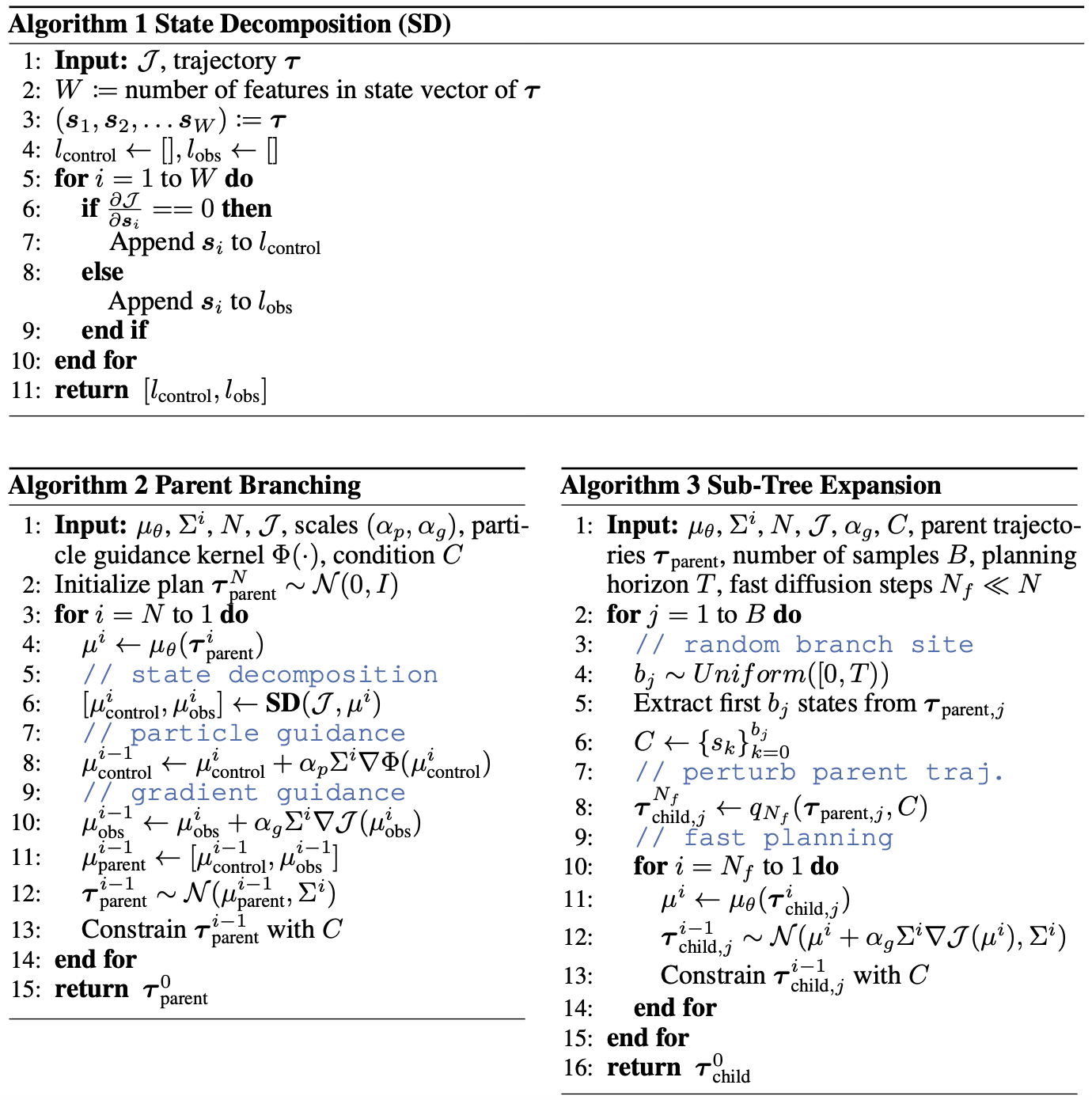
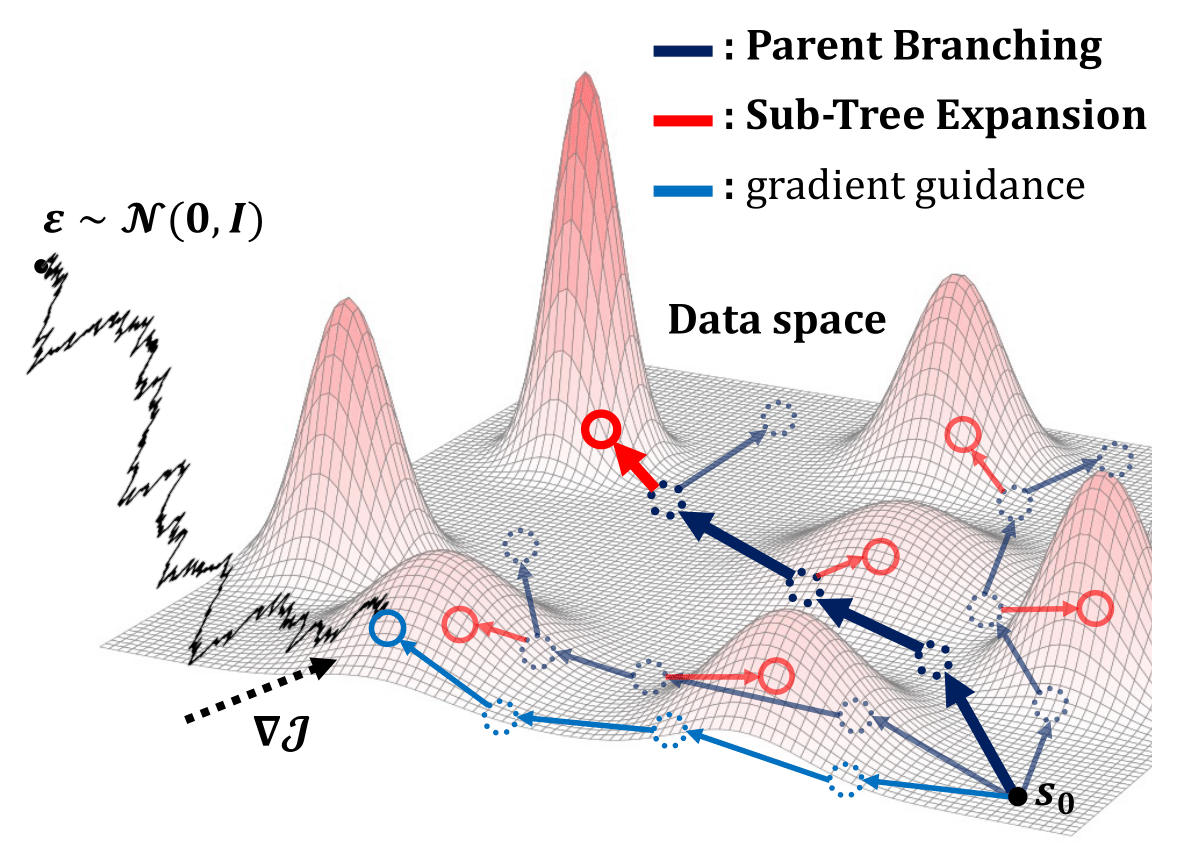
Parent Branching
Unlike conventional gradient guidance methods that pull samples toward high-reward regions, PG introduces repulsive forces that push samples apart in the data space. This leads to broad coverage of dynamically feasible trajectories independent of task objectives.
A single denoising step for parent branching denoted as:
$$
\left[\boldsymbol{\mu}^{i}_{\text{control}},\; \boldsymbol{\mu}^{i}_{\text{obs}}\right] \leftarrow \mathbf{SD}(\mathcal{J}, \boldsymbol{\mu}_{\theta}(\boldsymbol{\tau}^{i}))
$$
$$
\boldsymbol{\mu}^{i-1}_{\text{control}} \leftarrow \boldsymbol{\mu}^{i}_{\text{control}} + \alpha_p \Sigma^i \nabla \Phi(\boldsymbol{\mu}^{i}_{\text{control}}), \quad
\boldsymbol{\mu}^{i-1}_{\text{obs}} \leftarrow \boldsymbol{\mu}^{i}_{\text{obs}} + \alpha_g \Sigma^i \nabla \mathcal{J}(\boldsymbol{\mu}^{i}_{\text{obs}})
$$
$$
\boldsymbol{\mu}^{i-1} \leftarrow \left[\boldsymbol{\mu}^{i-1}_{\text{control}},\; \boldsymbol{\mu}^{i-1}_{\text{obs}}\right]
$$
$$
\boldsymbol{\tau}^{i-1} \sim \mathcal{N}(\boldsymbol{\mu}^{i-1}, \Sigma^i)
$$
where $\boldsymbol{\mu}^i_{\text{control}}$ and $\boldsymbol{\mu}^i_{\text{obs}}$ denote the
control and
observation components of the predicted mean of the denoising trajectory at timestep $i$, and $(\alpha_p, \alpha_g)$ are the guidance strengths for the particle guidance and gradient guidance, respectively.
$\mathbf{SD}(\mathcal{J}, \cdot)$ is the state decomposition function that autonomously partitions the state vector into
control and
observation components based on the test-time task $\mathcal{J}$, while $\Phi(\cdot)$ denotes the radical basis function (RBF) kernel in particle guidance.
Sub-Tree Expansion
For each parent trajectory, a random branch site is selected, and a child trajectory is generated by denoising from a partially noised version of the parent trajectory in order to refine parent trajectories using gradient guidance signals. Sub-tree expansion proceeds as:
$$
\boldsymbol{\tau}_{\text{child}}^{N_f} \sim q_{N_f}(\boldsymbol{\tau}_{\text{parent}}, \boldsymbol{C}) \quad
\text{where} \; \boldsymbol{C}=\{ \boldsymbol{s}_k \}_{k=0}^{b} \; \text{and} \; b\sim Uniform\left(0, T_{\text{pred}}\right)
$$
where $\boldsymbol{C}$ denotes the parent trajectory prefix, $q_{N_f}$ is the partial forward noising distribution with $N_f$ denoising steps, and $\boldsymbol{\tau}_{\text{child}}^{N_f}$ is the partially noised trajectory from which the child trajectory is denoised during sub-tree expansion.
The full algorithm of TDP  is provided in Algorithm.
is provided in Algorithm.
 ).
).